4 Linux进程间通信应用开发
4.1 初识进程
在日常工作/学习中,读者可能会经常听到如下一些词:“作业”,“任务”,“开了几个线程”,“创建了几个进程”,“多线程”,“多进程”等等。如果系统学习过《操作系统》这门课程,相信大家对这些概念都十分了解。但对很多电子、电气工程专业(或是其他非计算机专业)的同学来说,由于这门课程不是必修课程,我们脑海中可能就不会有这些概念,听到这些概念的时候就会不知所云,不过没有关系,先让我们克服对这些概念的恐惧。比如小时候刚开始学习数学的时候,先从正整数/自然数开始学习,然后逐步接触到分数、小数、负数、有理数、无理数、实数,再到复数等等。这些操作系统中的概念也是这样,让我们从初级阶段开始学起,逐步攻克这些新概念背后的真正含义。
本篇主要讨论linux进程间通信方式,这个主题拆分开始来看,分为三个部分:linux(操作系统)、进程、进程间通信。Linux操作系统本篇暂且不谈,我们主要来关注后两个部分:进程,以及进程间通信。在探讨进程间通信之前,让我们先关注一个知识点概念—-进程。
4.1.1 进程的概念
4.1.1.1 程序
在探讨进程之前,先思考一个问题:什么是程序?
嵌入式软件工程师每天的工作/学习内容就是看C/C++源代码、分析C/C++源代码、编写C/C++源代码(有人会说,应该还有最重要的调试程序,我每天的工作日常是三分写程序,七分调试程序,调试程序去哪里了,大家别着急,这里先卖一个关子)。这些独立的源代码就是一个个程序。它们有一个共同特点,在我们阅读、分析、编写的过程中,此刻都是静态的,它们存储在我们的硬盘上、公司的服务器上。
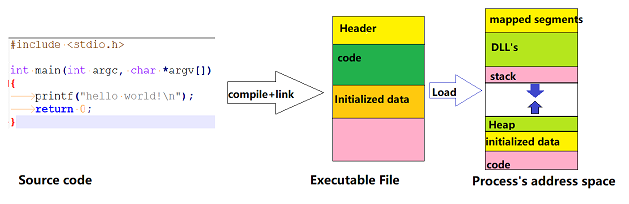
程序:存储在磁盘上的指令和数据的有序集合。如下就是一个程序,此刻它正安静地躺在硬盘上。
01 #include
02
03 int main(int argc, char *argv[])
04{
05 printf("hello world!n");
06 return 0;
07}4.1.1.2 进程
有了上面程序的概念,先直接给出进程的定义。
进程:具有一定独立功能的程序在一个数据集合上的一次动态执行过程。它是动态的,包括创建、调度、执行和消亡(由操作系统完成的)。
定义中的每个词分开来我们都能理解,但是组合到一起成为一个句子时,我们又不知道什么意思了。图灵奖得主Pascal之父尼古拉斯·沃斯,提出过一个著名的公式:程序=算法+数据结构。所谓算法就是解决一个问题的方法,程序就是使用算法对特定数据进行处理,这些数据是一个广义上的概念,不单单指像1,2,3,…等等这样的数据。因此用更直白的语言来说,程序开始运行,对数据进行分析处理的过程就是一个进程。
4.1.1.3 进程和程序的联系
- 程序是产生进程的基础。
- 程序的每次执行构成不同的进程。
- 进程是程序功能的体现(还记得之前提到的程序员日常工作中的一个重要事项—-调试程序吗?调试的过程实际上就是程序的执行,就是本次程序功能的体现,因此这个时候它就是一个进程)。
- 通过多次执行,一个程序可对应多个进程;通过调用关系,一个进程可包含多个程序。
4.1.1.4 进程和程序的区别
|
|
程序 |
进程 |
|---|---|---|
|
状态 |
静态的,是有序代码的集合 |
动态的,是程序功能的执行过程 |
|
生命期 |
永久的,长久保存在存储设备上 |
暂时的,一个程序执行结束,则它对应的进程结束 |
下图反应了从程序到进程的变化过程。
我们以一个生活中的例子来加深对进程和程序的理解:
1.有一位计算机科学家,他的女儿要过生日了,他准备给女儿做一个生日蛋糕,于是他去找了一本菜谱,跟着菜谱学习做蛋糕。
菜谱=程序 科学家=CPU 做蛋糕的原材料=数据 做蛋糕的过程=进程
2.科学家正在做蛋糕的时候,突然他的小儿子跑过来,说他的手被扎破了,于是科学家又去找了一本医疗手册,给小儿子处理伤口,处理完伤口之后,继续做生日蛋糕
医疗手册=新程序 给小儿子处理伤口=新进程
从做蛋糕切换到优先包扎伤口=进程切换 处理完伤口继续做生日蛋糕=进程恢复 介绍到这里,希望读者对进程已经建立起一些基础概念了,有关进程的深入部分,我们在这里暂且先不介绍,比如进程的组成包括哪些(代码段,用户数据段,系统数据段)?进程的类型有哪些?进程的状态有哪些等等?这些深入内容,在我们掌握了进程的基础知识之后,读者有兴趣的话,可以查阅相关书籍资料。
4.1.2 进程的操作(创建、结束、回收)
4.1.2.1 创建进程
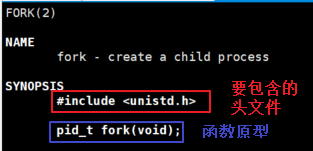
使用fork函数来创建一个进程
头文件: #include
函数原型: pid_t fork(void);
返回值: 成功时,父进程返回子进程的进程号(>0的非零整数),子进程中返回0;通过fork函数的返回值区分父子进程。
父进程: 执行fork函数的进程。
子进程: 父进程调用fork函数之后,生成的新进程。 请重点注意:这个函数的返回值和我们接触的绝大部分函数的返回值不一样。
一般地,一个函数的返回值只有一个值,但是该函数的返回值却有两个。实际上关于这个函数的返回值究竟有几个,可以换一种方式来理解,因为这个函数执行之后,系统中会存在两个进程—-父进程和子进程,在每个进程中都返回了一个值,所以给用户的感觉就是返回了两个值。
进程的特点:
- 在linux中,一个进程必须是另外一个进程的子进程,或者说一个进程必须有父进程,但是可以没有子进程。
- 子进程继承了父进程的内容,包括父进程的代码,变量,pcb,甚至包括当前PC值。在父进程中,PC值指向当前fork函数的下一条指令地址,因此子进程也是从fork函数的下一条指令开始执行。父子进程的执行顺序是不确定的,可能子进程先执行,也可能父进程先执行,取决于当前系统的调度。
- 父子进程有独立的地址空间、独立的代码空间,互不影响,就算父子进程有同名的全局变量,但是由于它们处在不同的地址空间,因此不能共享。
- 子进程结束之后,必须由它的父进程回收它的一切资源,否则就会成为僵尸进程。
- 如果父进程先结束,子进程会成为孤儿进程,它会被INIT进程收养,INIT进程是内核启动之后,首先被创建的进程。
Tips:
在linux下,当我们不熟悉某个系统接口API函数时(比如不知道调用这个函数需要包含的头文件,不知道这个函数的每个参数的意义等等),我们可以在ubuntu下使用man命令来查看这个函数的说明。

示例程序(参考:jz2440process1th_create_processcreate_process.c)
01 /**********************************************************************
02 * 功能描述: 创建一个子进程
03 * 输入参数: 无
04 * 输出参数: 无
05 * 返 回 值: 无
06 * 修改日期 版本号 修改人 修改内容
07 * -----------------------------------------------
08 * 2020/05/16 V1.0 zh(ryan) 创建
09 ***********************************************************************/
10
11 #include
12 #include
13 #include
14 #include
15
16 int main(int argc, char *argv[])
17 {
18 pid_t pid;
19
20 pid = fork(); // 创建子进程
21
22 if (pid == 0) { // 子进程
23 int i = 0;
24 for (i = 0; i < 5; i++) {
25 usleep(100);
26 printf("this is child process i=%dn", i);
27 }
28 }
29
30 if (pid > 0) { // 父进程
31 int i = 0;
32 for (i = 0; i < 5; i++) {
33 usleep(100);
34 printf("this is parent process i=%dn", i);
35 }
36 }
37
38 while(1); //不让进程结束,以便我们查看进程的一些状态信息
39 return 0;
40 }JZ2440实验
在jz2440开发板上实验,读者首先需要创建好NFS文件系统,jz2440开发板从网络文件系统启动,以便运行在ubuntu上编译好的可执行文件,关于如何搭建NFS文件系统请参考视频教程《u-boot_内核_根文件系统(ARM裸机1期加强版与2期驱动大全间的衔接)》。读者也可以在ubuntu上执行,将编译器从“arm-linux-gcc”换成“gcc”即可。
- 编译程序
arm-linux-gcc create_process.c -o create_process- 将可执行文件test拷贝到NFS文件系统对应的目录下
cp create_process /work/nfs_root/first_fs- 在jz2440开发板的串口下此时能看到该可执行文件
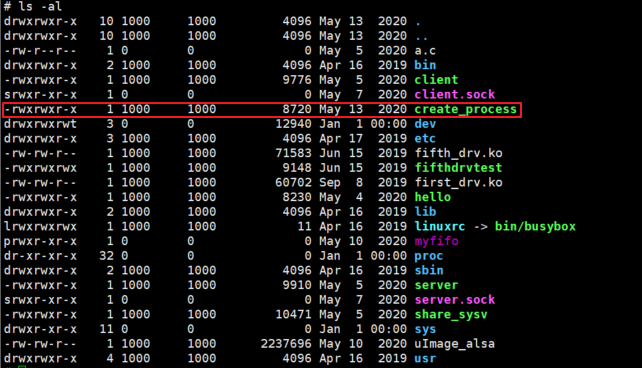
- 执行可执行文件
”&”表示在后台执行,这样我们可以继续在串口控制台下敲入命令,控制台能够接收到输入字符并作出响应;如果不加”&”,表示在前台执行,控制台不能对输入字符作出响应。
./create_process &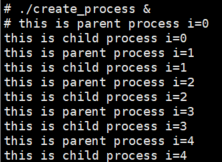
- top命令查看进程状态
top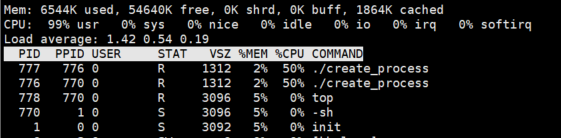
发现此时确实存在两个进程create_process,其中一个进程PID是777(它的父进程PID是776),另外一个进程PID是776(它的父进程PID是770)。
4.1.2.2 结束进程
使用exit函数来结束一个进程
头文件: #include
函数原型: void exit (int status)使用_exit函数来结束一个进程
头文件: #include
函数原型: void _exit(int status); 两个函数的区别是:exit结束进程时会刷新缓冲区,_exit不会;
这两个退出函数和return函数又有什么区别呢?exit和 _ exit函数是返回给操作系统的,return函数是当前函数返回,返回到调用它的函数中,如果正好是在main函数中,return函数也返回给了操作系统,这个时候return和exit、_exit起到了类似的作用。
程序实验:验证exit和_exit的区别
示例1:使用exit退出(参考:jz2440process2th_exit_processexit_process.c)
01 /**********************************************************************
02 * 功能描述: 使用exit退出当前进程
03 * 输入参数: 无
04 * 输出参数: 无
05 * 返 回 值: 无
06 * 修改日期 版本号 修改人 修改内容
07 * -----------------------------------------------
08 * 2020/05/16 V1.0 zh(ryan) 创建
09 ***********************************************************************/
10 #include
11 #include
12
13 int main(int argc, char *argv[])
14 {
15 printf("hello worldn");
16 printf("will exit");
17 exit(0); //使用_exit退出
18 }示例2:使用_exit退出(参考:jz2440process3th_exit_processexit_process.c)
01 /**********************************************************************
02 * 功能描述: 使用_exit退出当前进程
03 * 输入参数: 无
04 * 输出参数: 无
05 * 返 回 值: 无
06 * 修改日期 版本号 修改人 修改内容
07 * -----------------------------------------------
08 * 2020/05/16 V1.0 zh(ryan) 创建
09 ***********************************************************************/
10 #include
11 #include
12
13 int main(int argc, char *argv[])
14 {
15 printf("hello worldn");
16 printf("will exit");
17 _exit(0); //使用_exit退出
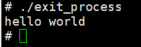
18 } 在两个示例程序中,第15行比第16行的打印语句多了一个“n”,它会强制将待打印的字符刷新到缓冲区,为了对比exit和_exit的区别,在第16行中就没有加上“n”,按照上面两个退出函数的区别,示例1应该会同时打印“hello world”和“will exit”,示例2程序只会打印“hello world”,不会打印“will exit”,那么到底是不是这样呢?我们在jz2440下验证一下。
JZ2440实验
示例1
- 编译
arm-linux-gcc exit_process.c -o exit_process- 拷贝到NFS
cp exit_process /work/nfs_root/first_fs- 运行
./exit_process运行结果,确实同时打印了“hello world”和“will exit”
4.1.2.3 回收进程
使用wait函数来回收一个进程
头文件: #include
#include
函数原型: pid_t wait(int *status);
返回值: 成功返回子进程的进程号,失败返回-1使用waitpid函数来回收一个进程
头文件: #include
#include
函数原型: pid_t waitpid(pid_t pid, int *status, int options);
返回值: 成功返回子进程的进程号,失败返回-1程序示例:子进程退出,父进程回收子进程(参考:jz2440process4th_exit_waitexit_wait.c)
1 /**********************************************************************
02 * 功能描述: 使用exit退出子进程,父进程使用waitpid回收子进程的资源
03 * 输入参数: 无
04 * 输出参数: 无
05 * 返 回 值: 无
06 * 修改日期 版本号 修改人 修改内容
07 * -----------------------------------------------
08 * 2020/05/16 V1.0 zh(ryan) 创建
09 ***********************************************************************/
10 #include
11 #include
12 #include
13 #include
14 #include
15
16 int main(int argc, char *argv[])
17 {
18 int status = -1;
19 pid_t pid;
20
21 pid = fork();
22 if (pid == 0){ //子进程
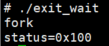
23 printf("forkn");
24 exit(1);
25 } else if (pid > 0) { //父进程
26 pid = waitpid(pid, &status, 0);
27 printf("status=0x%xn", status);
28 } else {
29 perror("forkn");
30 }
31
32 return 0;
33 }JZ2440实验
- 编译
arm-linux-gcc exit_wait.c -o exit_wait- 拷贝到NFS
cp exit_wait /work/nfs_root/first_fs- 运行
./exit_wait运行结果
4.2 进程为什么需要通信
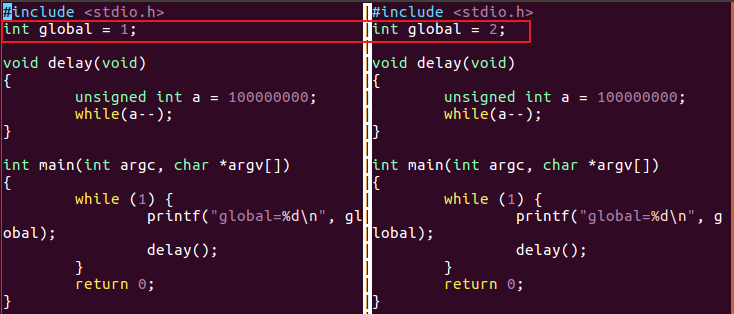
先让我们看如下两个简单的程序,这两个程序中都有一个同名全局变量“global”,唯一的区别是这个全局变量的初始值不同。说明:以下两个示例程序是为了让我们理解进程的一个特点,因此实验环境是Ubuntu虚拟机。
程序1:
01 #include
02 int global = 1;
03
04 void delay(void)
05 {
06 unsigned int a = 1000000;
07 while(a--);
08 }
09
10 int main(int argc, char *argv[])
11 {
12 while (1) {
13 printf("global=%dn", global);
14 delay();
15 }
16 return 0;
17 }程序2:
01 #include
02 int global = 2;
03
04 void delay(void)
05 {
06 unsigned int a = 1000000;
07 while(a--);
08 }
09
10 int main(int argc, char *argv[])
11 {
12 while (1) {
13 printf("global=%dn", global);
14 delay();
15 }
16 return 0;
17 }两个程序的唯一区别如下红框所示:
- 编译程序
gcc test1.c -o test1
gcc test2.c -o test2- 运行程序
./test1
./test2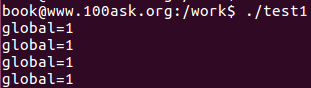
程序1运行结果
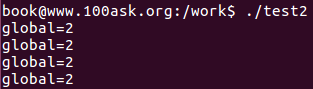
程序2运行结果
我们发现,两个程序运行之后,当前进程中的全局变量global的值并不会改变,它不会被改变成另外一个进程中的值,由此引出的进程的一个特点:**进程资源的唯一性,不共享性,它不能访问别的进程中的数据(地址空间),也不能被别的进程访问本身的数据(地址空间)。**每个进程对其他进程而言,就是一个黑盒(后面读者学习到线程的时候,会发现在这个特性上,线程是有别于进程的)。
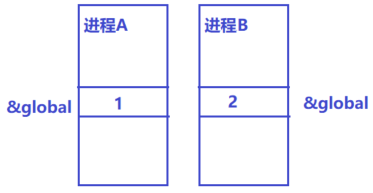
那么为什么会这样呢?这是因为操作系统为了保证系统的安全(进程A奔溃不会影响进程B,进程B仍然会继续运行),它会为每个进程分配特定的地址空间,每个进程只能在这个特定的地址空间执行指令、访问数据,如下图所示。程序需要访问某个变量时,都是通过变量地址去访问该变量的,在不同的进程中,同名变量对应不同的地址(处在当前进程地址空间范围内),进程无法访问分配给它的地址范围之外的地址空间,自然就无法获得其他进程中的变量值。
进程间为何需要通信呢?从上面的两个示例程序中,可以得知:不同进程之间无法互相访问对方的地址空间。但是在我们实际的项目开发中,为了实现各种各样的功能,不同进程之间一定需要数据交互,那么我们应该如何实现进程间数据交互呢?这就是进程间通信的目的:实现不同进程之间的数据交互。
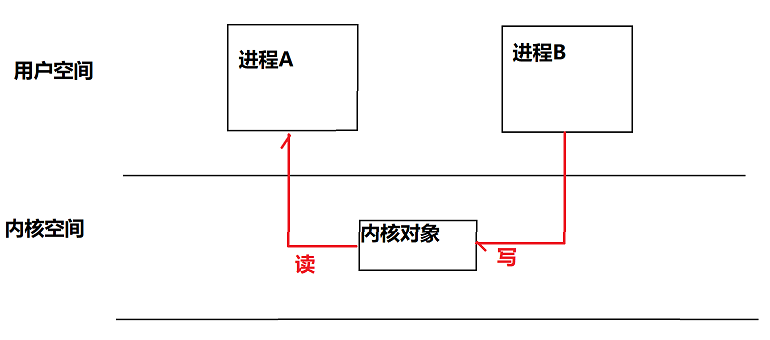
在linux下,内存空间被划分为用户空间和内核空间,应用程序开发人员开发的应用程序都存在于用户空间,绝大部分进程都处在用户空间;驱动程序开发人员开发的驱动程序都存在于内核空间。
在用户空间,不同进程不能互相访问对方的资源,因此,在用户空间是无法实现进程间通信的。为了实现进程间通信,必须在内核空间,由内核提供相应的接口来实现,linux系统提供了如下四种进程通信方式。
|
进程间通信方式 |
分类 |
|---|---|
|
管道通信 |
无名管道、有名管道 |
|
IPC通信 |
共享内存、消息队列、信号灯 |
|
信号通信 |
信号发送、接收、处理 |
|
socket通信 |
本地socket通信,远程socket通信 |
linux有一个最基本的思想—-“一切皆文件”,内核中实现进程间通信也是基于文件读写思想。不同进程通过操作内核里的同一个内核对象来实现进程间通信,如下图所示,这个内核对象可以是管道、共享内存、消息队列、信号灯、信号,以及socket。
4.3 进程通信之管道通信
管道分为无名管道和有名管道,其特点如下
|
类型 |
特点 |
|---|---|
|
无名管道 |
在文件系统中没有文件节点,只能用于具有亲缘关系的进程间通信(比如父子进程) |
|
有名管道 |
在文件系统中有文件节点,适用于在同一系统中的任意两个进程间通信 |
4.3.1 无名管道
4.3.1.1 特点
无名管道实际上就是一个单向队列,在一端进行读操作,在另一端进行写操作,所以需要两个文件描述符,描述符fd[0]指向读端,fd[1]指向写端。它是一个特殊的文件,所以无法使用简单open函数创建,我们需要pipe函数来创建。它只能用于具有亲缘关系的两个进程间通信。

4.3.1.2 创建无名管道
1.头文件#include
2.函数原型: int pipe(int fd[2])
3.参数: 管道文件描述符,有两个文件描述符,分别是fd[0]和fd[1],管道有一个读端fd[0]和一个写端fd[1]
4.返回值: 0表示成功;1表示失败4.3.1.3 读、写、关闭管道
1.读管道 read,读管道对应的文件描述符是fd[0]
2.写管道 write,写管道对应的文件描述符是fd[1]
3.关闭管道 close,因为创建管道时,会同时创建两个管道文件描述符,分别是读管道文件描述符fd[0]和写管道文件描述符fd[1],因此需要关闭两个文件描述符4.3.1.4 无名管道实现进程间通信
程序示例1
(参考:jz2440process_pipe1th_write_pipemy_pipe_write.c)
01 /**********************************************************************
02 * 功能描述: 创建一个管道,并向管道中写入字符串,然后从管道中读取,验证
03 能否读取之前写入的字符串
04 * 输入参数: 无
05 * 输出参数: 无
06 * 返 回 值: 无
07 * 修改日期 版本号 修改人 修改内容
08 * -----------------------------------------------
09 * 2020/05/16 V1.0 zh(ryan) 创建
10 ***********************************************************************/
11 #include
12 #include
13 #include
14
15 int main(int argc, char *argv[])
16 {
17 int fd[2];
18 int ret = 0;
19 char write_buf[] = "Hello linux";
20 char read_buf[128] = {0};
21
22 ret = pipe(fd);
23 if (ret < 0) {
24 printf("create pipe failn");
25 return -1;
26 }
27 printf("create pipe sucess fd[0]=%d fd[1]=%dn", fd[0], fd[1]);
28
29 //向文件描述符fd[1]写管道
30 write(fd[1], write_buf, sizeof(write_buf));
31
32 //从文件描述符fd[0]读管道
33 read(fd[0], read_buf, sizeof(read_buf));
34 printf("read_buf=%sn", read_buf);
35
36 close(fd[0]);
37 close(fd[1]);
38 return 0;
39 }JZ2440实验
- 编译
arm-linux-gcc my_pipe_write.c -o my_pipe_write- 拷贝到NFS文件系统
cp my_pipe_write /work/nfs_root/first_fs- 运行
./my_pipe_write运行结果,发现能够正确读到管道中的字符串” Hello linux”。
程序示例2
在利用无名管道实现进程间通信之前,先让我们看一下如下的程序:我们知道父子进程的执行顺序是不确定的,是受系统调度的。我们在父进程中创建一个子进程,我们想让父进程控制子进程的运行,父进程设置“process_inter=1”,当“process_inter=1”时,子进程才会执行打印操作,否则子进程不执行打印操作。我们看如下的程序能够实现我们的目的吗?
(参考:jz2440process_pipe2th_commtest.c)
01 /**********************************************************************
02 * 功能描述: 1.在父进程中创建一个子进程,
03 2.父进程执行完后,将变量process_inter赋值为1;
04 3.子进程判断process_inter为1则执行后面的打印语句,否则不执行。
05 * 输入参数: 无
06 * 输出参数: 无
07 * 返 回 值: 无
08 * 修改日期 版本号 修改人 修改内容
09 * -----------------------------------------------
10 * 2020/05/16 V1.0 zh(ryan) 创建
11 ***********************************************************************/
12 #include
13 #include
14 #include
15 #include
16
17 int main(int argc, char *argv[])
18 {
19 pid_t pid;
20 int process_inter = 0;
21
22 pid = fork(); // 创建子进程
23
24 if (pid == 0) { // 子进程
25 int i = 0;
26 while (process_inter == 0); //
27 for (i = 0; i < 5; i++) {
28 usleep(100);
29 printf("this is child process i=%dn", i);
30 }
31 }
32
33 if (pid > 0) { // 父进程
34 int i = 0;
35 for (i = 0; i < 5; i++) {
36 usleep(100);
37 printf("this is parent process i=%dn", i);
38 }
39 process_inter == 1;
40 }
41
42 while(1);
43 return 0;
44 }JZ2440实验
- 编译
arm-linux-gcc test.c -o test- 拷贝到NFS文件系统
cp test /work/nfs_root/first_fs- 运行
./test运行结果,发现第29行打印语句一直没有,子进程中process_inter一直为0。
程序示例3
(参考:jz2440process_pipe3th_pipe_commcomm_fork.c)
01 /**********************************************************************
02 * 功能描述: 1.使用无名管道实现父子进程通信
03 2.父进程向管道中写入一个值
04 3.子进程从管道中读取该值,如果非零,则执行后面的打印,否则不执行
05 * 输入参数: 无
06 * 输出参数: 无
07 * 返 回 值: 无
08 * 修改日期 版本号 修改人 修改内容
09 * -----------------------------------------------
10 * 2020/05/16 V1.0 zh(ryan) 创建
11 ***********************************************************************/
12
13 #include
14 #include
15 #include
16 #include
17
18 int main(int argc, char *argv[])
19 {
20 pid_t pid;
21 char process_inter = 0;
22 int fd[2], ret = 0;
23
24 ret = pipe(fd); //创建一个无名管道,必须在创建子进程之前
25 if (ret < 0) {
26 printf("create pipe failn");
27 return -1;
28 }
29 printf("create pipe sucessn");
30
31 pid = fork(); //创建子进程
32
33 if (pid == 0) { // 子进程
34 int i = 0;
35 read(fd[0], &process_inter, sizeof(process_inter)); // 如果管道为空,则休眠等待
36 while (process_inter == 0);
37 for (i = 0; i < 5; i++) {
38 usleep(100);
39 printf("this is child process i=%dn", i);
40 }
41 } else if (pid > 0) { // 父进程
42 int i = 0;
43 for (i = 0; i < 5; i++) {
44 usleep(100);
45 printf("this is parent process i=%dn", i);
46 }
47 process_inter = 1;
48 sleep(2);
49 write(fd[1], &process_inter, sizeof(process_inter));
50 }
51
52 while(1);
53 return 0;
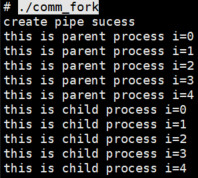
54 }JZ2440实验
- 编译
arm-linux-gcc comm_fork.c -o comm_fork- 拷贝到NFS文件系统
cp comm_fork /work/nfs_root/first_fs- 运行
./comm_fork运行结果,因为第38行2s延时,父进程打印结束后大约2s左右的时间,子进程中的打印也正确输出了,如下所示。
4.3.2 有名管道
4.3.2.1 特点
所谓有名管道,顾名思义,就是在内核中存在一个文件名,表明这是一个管道文件。Linux中存在7种文件类型,分别如下。
|
文件类型 |
文件特点 |
|---|---|
|
普通文件 |
标识符 ‘-’ ,用open方式创建 |
|
目录文件 |
标识符 ‘d’ ,用mkdir方式创建 |
|
链接文件 |
标识符 ‘l’, la -s, 又可以分为软链接,硬链接 |
|
(有名)管道文件 |
标识 ‘p’, 用mkfifo创建 |
|
socket文件 |
标识符 ‘s’,用socket创建 |
|
字符设备文件 |
标识符 ‘c’ |
|
块设备文件 |
标识符 ‘b’ |
有名管道既可以用于具有亲缘关系的进程间通信,又可以用于非亲缘关系的进程间通信,在我们的实际项目中,很多进程之间是不具有亲缘关系的,因此有名管道使用的情况会更普遍一些。
4.3.2.2 创建有名管道
函数原型 : int mkfifo(const char * filename, mode_t mode)
参数 :管道文件文件名,权限,创建的文件权限仍然和umask有关系
返回值 : 成功返回0,失败返回-1注意:mkfifo并没有在内核中生成一个管道,只是在用户空间生成了一个有名管道文件
4.3.2.3 有名管道实现进程间通信
示例程序1
创建一个有名管道文件(参考:jz2440process_pipe4th_create_myfifocreate_myfifo.c)
01 /**********************************************************************
02 * 功能描述: 1.创建一个有名管道
03 * 输入参数: 无
04 * 输出参数: 无
05 * 返 回 值: 无
06 * 修改日期 版本号 修改人 修改内容
07 * -----------------------------------------------
08 * 2020/05/16 V1.0 zh(ryan) 创建
09 ***********************************************************************/
10
11 #include
12 #include
13 #include
14 #include
15
16 int main(int argc, char *argv[])
17 {
18 int ret;
19
20 ret = mkfifo("./myfifo", 0777); //创建有名管道,文件权限为777
21 if (ret < 0) {
22 printf("create myfifo failn");
23 return -1;
24 }
25 printf("create myfifo sucessn");
26
27 return 0;
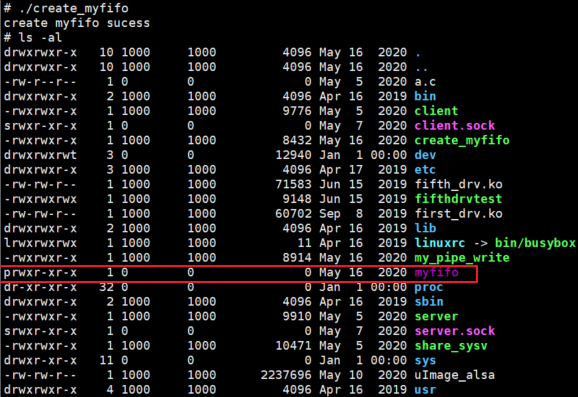
28 }JZ2440实验
- 编译
arm-linux-gcc create_myfifo.c -o create_myfifo- 拷贝到NFS文件系统
cp create_myfifo /work/nfs_root/first_fs- 运行
./create_myfifo运行结果,发现在当前目录下生成一个有名管道文件myfifo(文件类型是“-p”)。
示例程序2
进程1源码(参考:jz2440process_pipe5th_myfifo_comm5nd_named_pipe.c)
01 /**********************************************************************
02 * 功能描述: 1.进程1中创建一个有名管道3rd_fifo,权限是0777
03 2.以写方式打开这个有名管道文件,并向其中写入一个值
04 * 输入参数: 无
05 * 输出参数: 无
06 * 返 回 值: 无
07 * 修改日期 版本号 修改人 修改内容
08 * -----------------------------------------------
09 * 2020/05/16 V1.0 zh(ryan) 创建
10 ***********************************************************************/
11
12 #include
13 #include
14 #include
15 #include
16 #include
17
18 int main(int argc, char *argv[])
19 {
20 int i, ret, fd;
21 char p_flag = 0;
22
23 /* 创建有名管道 */
24 if (access("./3rd_fifo", 0) < 0) { //先判断有名管道文件是否存在,不存在需要先创建
25 ret = mkfifo("./3rd_fifo", 0777);
26 if (ret < 0) {
27 printf("create named pipe failn");
28 return -1;
29 }
30 printf("create named pipe sucessn");
31 }
32
33 /* 打开有名管道,以写方式打开 */
34 fd=open("./3rd_fifo", O_WRONLY);
35 if (fd < 0) {
36 printf("open 3rd_fifo failn");
37 return -1;
38 }
39 printf("open 3rd_fifo sucessn");
40
41 for (i = 0; i < 5; i++) {
42 printf("this is first process i=%dn", i);
43 usleep(100);
44 }
45 p_flag = 1;
46 sleep(5);
47 write(fd, &p_flag, sizeof(p_flag));
48
49 while(1);
50 return 0;
51 }进程2源码(参考:jz2440process_pipe5th_myfifo_comm5nd_named_pipe_2.c)
01 /**********************************************************************
02 * 功能描述: 1.只读方式打开这个有名管道文件,并读取这个值
03 2.当这个值非零时,继续执行后面的打印输出语句
04 * 输入参数: 无
05 * 输出参数: 无
06 * 返 回 值: 无
07 * 修改日期 版本号 修改人 修改内容
08 * -----------------------------------------------
09 * 2020/05/16 V1.0 zh(ryan) 创建
10 ***********************************************************************/
11
12 #include
13 #include
14 #include
15 #include
16 #include
17
18 int main(int argc, char *argv[])
19 {
20 int i;
21 int fd=open("./3rd_fifo", O_RDONLY);
22 char p_flag = 0;
23
24 if (fd < 0) {
25 printf("open 3rd_fifo failn");
26 return -1;
27 }
28
29 printf("open 3rd_fifo sucessn");
30 read(fd, &p_flag, sizeof(p_flag));
31 while(!p_flag);
32 for (i = 0; i < 5; i++) {
33 printf("this is second process i=%dn", i);
34 usleep(100);
35 }
36
37 while(1);
38 return 0;
39 }JZ2440实验
- 编译
arm-linux-gcc 5nd_named_pipe.c -o 5nd_named_pipe
arm-linux-gcc 5nd_named_pipe_2.c -o 5nd_named_pipe_2- 拷贝到NFS文件系统
cp 5nd_named_pipe /work/nfs_root/first_fs
cp 5nd_named_pipe_2 /work/nfs_root/first_fs- 运行
注意我们这里都在后台运行可执行程序,方便我们在串口中断下多次输入。
./5nd_named_pipe &
./5nd_named_pipe_2 &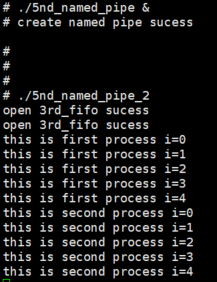
4.4 进程通信之IPC通信
IPC通信分为共享内存、消息队列以及信号灯。这些IPC对象(共享内存、消息队列、信号灯)都存在于内核空间中。
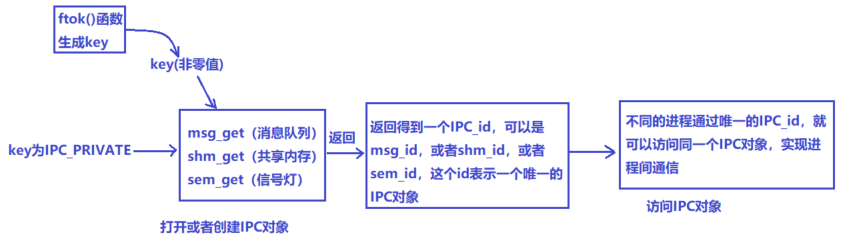
应用程序使用IPC通信的一般步骤如下:
- 首先生成一个key值。有两种生成key的方式,一种是使用宏IPC_PRIVATE表示一个key,它表示一个私有对象,只能用于当前进程或者具有亲缘关系的进程访问。另一种是使用ftok函数来生成一个key值,这种方式创建的IPC对象可以被不同的进程访问。
- 使用生成的key值,创建一个IPC对象(如果是已经创建好的IPC对象,则打开该IPC对象),这个时候每个IPC对象都有一个唯一的ID号(IPC_id,可以是shm_id,msg_id,sem_id,每个id代表一个IPC对象)。
- 进程通过IPC_id,调用访问IPC通道的读写函数来操作IPC对象。调用shmctrl,shmat,shmdt来访问共享内存;调用msgctrl,msgsnd,msgrecv访问消息队列;调用semctrl,semop访问信号灯。
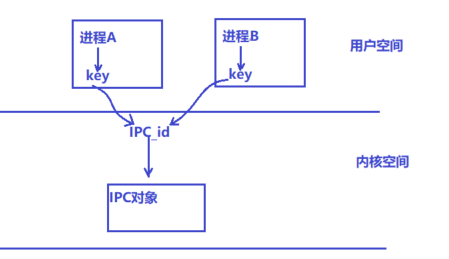
如何理解key和IPC_id(shm_id/msg_id/sem_id)
回答这个问题,请先思考一个问题,应用程序如何访问一个IPC对象(共享内存,消息队列、信号量灯)?
显然,我们需要一个唯一表示该IPC对象的身份ID(IPC_id,该IPC_id是由操作系统来管理的),但是由于这个ID只在当前创建该IPC对象的进程中可以获取到,在别的IPC进程中都没法获取,那么如何得到IPC对象的ID呢?这个时候就需要key值了,它相当于IPC_id的一个别名,或者叫做外部名,因此key值必须也是唯一的,这样才能得到唯一的IPC对象id。不同进程通过同一个key值得到同一个IPC对象id,来访问同一个IPC对象。如下图所示
ftok函数
函数原型 : char ftok(const char *path, char key)
参数 : path,存在并且可以访问的文件路径
key,一个字符
返回值 : 正确返回一个key值,出错返回-1 为何需要ftok函数先生成key,然后再创建IPC对象?
这就类似于无名管道和有名管道的区别,使用IPC_PRIVATE宏创建的共享内存就类似于无名管道,只能实现有亲缘关系的进程间通信。
那么为什么又需要使用ftok生成一个key值呢?是否可以直接指定一个非零值呢?直接指定一个非零的key值做法是不建议的,因为读者自己指定的key值很有可能于系统中已经存在的key值一样。
ftok函数创建了一个key值之后,就类似于有名管道,既可以实现具有亲缘关系的进程间通信,又能够实现非亲缘关系的进程间通信。
4.4.1 共享内存
4.4.1.1 特点
所谓共享内存是指多个进程都可以访问的同一块地址空间,但是我们知道Linux操作系统为了保证系统执行的安全,为每个进程划分了各自独立的地址空间,每个进程不能访问别的进程的地址空间,那么共享内存实现的原理是什么呢?
内核开辟一块物理内存区域,进程本身将这片内存空间映射到自己的地址空间进行读写。
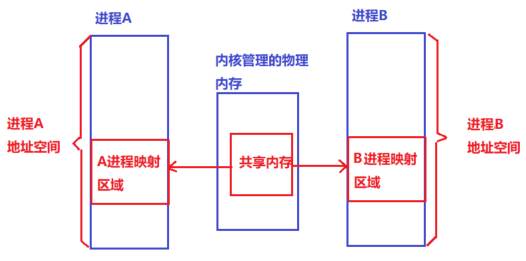
从图中可以看到,进程可以直接访问这片内存,数据不需要在两进程间复制,所以速度较快。共享内存没有任何的同步与互斥机制,所以要使用信号量来实现对共享内存的存取的同步。
当需要使用共享内存进行通信时,一般步骤如下:
- 先创建一片共享内存,该内存存在于内核空间中。
- 进程通过key值找到这片共享内存的唯一ID,然后将这片共享内存映射到自己的地址空间。
- 每个进程通过读写映射后的地址,来访问内核中的共享内存。
4.4.1.2创建共享内存
函数原型 : int shmget(key_t key, int size, int shmflg)
头文件: #include
函数参数 : key: IPC_PRIVATE 或 ftok的返回值
IPC_PRIVATE返回的key值都是一样的,都是0
size : 共享内存区大小
shmflg : 同open函数的权限位,也可以用八进制表示法
返回值 : 成功,共享内存段标识符ID; -1 出错程序示例1(参考jz2440process_ipc1st_shm1st_shm.c)
01 /**********************************************************************
02 * 功能描述: 1.使用IPC_PRIVATE创建共享内存
03 * 输入参数: 无
04 * 输出参数: 无
05 * 返 回 值: 无
06 * 修改日期 版本号 修改人 修改内容
07 * -----------------------------------------------
08 * 2020/05/16 V1.0 zh(ryan) 创建
09 ***********************************************************************/
10
11 #include
12 #include
13 #include
14 #include
15 #include
16 #include
17
18 int main(int argc, char *argv[])
19 {
20 int shmid;
21
22 shmid = shmget(IPC_PRIVATE, 128, 0777);
23 if (shmid < 0) {
24 printf("create shared memory failn");
25 return -1;
26 }
27 printf("create shared memory sucess, shmid = %dn", shmid);
28 system("ipcs -m");
29 return 0;
30 }JZ2440实验
- 编译
arm-linux-gcc 1st_shm.c -o 1st_shm- 拷贝到NFS文件系统
cp 1st_shm /work/nfs_root/first_fs- 运行
执行第18行程序后,会在串口打印如下信息,这行语句的作用和我们直接在串口console下面输入“ipcs -m”是一样的。我们发现此时共享内存的key值为0。
./1st_shm
程序示例2(参考jz2440process_ipc1st_shm2nd_shm.c)
程序源码,使用fotk函数生成一个key值
01 /**********************************************************************
02 * 功能描述: 1.使用ftok函数生成的key创建共享内存
03 * 输入参数: 无
04 * 输出参数: 无
05 * 返 回 值: 无
06 * 修改日期 版本号 修改人 修改内容
07 * -----------------------------------------------
08 * 2020/05/16 V1.0 zh(ryan) 创建
09 ***********************************************************************/
10
11 #include
12 #include
13 #include
14 #include
15 #include
16 #include
17
18 int main(int argc, char *argv[])
19 {
20 int shmid;
21 int key;
22
23 key = ftok("./a.c", 'a'); //先创建一个key值
24 if (key < 0) {
25 printf("create key failn");
26 return -1;
27 }
28 printf("create key sucess key = 0x%Xn",key);
29
30 shmid = shmget(key, 128, IPC_CREAT | 0777);
31 if (shmid < 0) {
32 printf("create shared memory failn");
33 return -1;
34 }
35 printf("create shared memory sucess, shmid = %dn", shmid);
36 system("ipcs -m");
37 return 0;
38 }JZ2440实验
- 编译
arm-linux-gcc 2nd_shm.c -o 2nd_shm- 拷贝到NFS文件系统
cp 2nd_shm /work/nfs_root/first_fs- 运行
我们需要在2nd_shm所在的同级目录下创建一个文件a.c(在jz2440开发板上)
touch a.c我们发现此时共享内存的key值为非零值0x610d0169.
./2nd_shm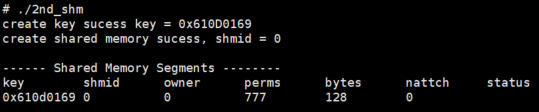
4.4.1.3 应用程序如何访问共享内存
我们知道创建的共享内存还是处于内核空间中,用户程序不能直接访问内核地址空间,那么用户程序如何访问这个共享内存呢?
shmat函数
将共享内存映射到用户空间,这样应用程序就可以直接访问共享内存了
函数原型 : void *shmat(int shmid, const void *shmaddr, int shmflg)
参数 : shmid ID号
shmaddr 映射地址, NULL为系统自动完成的映射
shmflg SHM_RDONLY共享内存只读
默认是0,可读可写
返回值:成功,映射后的地址;失败,返回NULL程序示例(参考jz2440process_ipc1st_shm3nd_shm.c)
01 /**********************************************************************
02 * 功能描述: 1.创建共享内存,将该共享内存地址通过shmat映射到用户地址空间
03 2.用户通过标准输入向这个共享内存中输入一行字符串
04 3.然后从该共享内存中读取内容,验证是否能够读取到
05 * 输入参数: 无
06 * 输出参数: 无
07 * 返 回 值: 无
08 * 修改日期 版本号 修改人 修改内容
09 * -----------------------------------------------
10 * 2020/05/16 V1.0 zh(ryan) 创建
11 ***********************************************************************/
12 #include
13 #include
14 #include
15 #include
16 #include
17 #include
18
19 int main(int argc, char *argv[])
20 {
21 int shmid;
22 int key;
23 char *p;
24
25 key = ftok("./a.c", 'b');
26 if (key < 0) {
27 printf("create key failn");
28 return -1;
29 }
30 printf("create key sucess key = 0x%Xn",key);
31
32 shmid = shmget(key, 128, IPC_CREAT | 0777);
33 if (shmid < 0) {
34 printf("create shared memory failn");
35 return -1;
36 }
37 printf("create shared memory sucess, shmid = %dn", shmid);
38 system("ipcs -m");
39
40 p = (char *)shmat(shmid, NULL, 0);
41 if (p == NULL) {
42 printf("shmat failn");
43 return -1;
44 }
45 printf("shmat sucessn");
46
47 //等待console输入,然后向共享内存写入数据
48 fgets(p, 128, stdin);
49
50 //读共享内存
51 printf("share memory data:%sn", p);
52
53 //再次读共享内存
54 printf("share memory data:%sn", p);
55 return 0;
56 }JZ2440实验
- 编译
arm-linux-gcc 3nd_shm.c -o 3nd_shm- 拷贝到NFS文件系统
cp 3nd_shm /work/nfs_root/first_fs- 运行
我们需要在3nd_shm所在的同级目录下创建一个文件a.c(在jz2440开发板上)
touch a.c此时会提示用户输入信息
./3nd_shm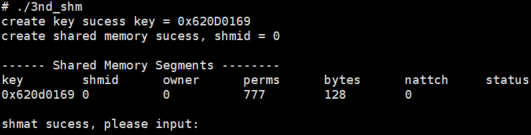
我们在console下输入任意字符,比如“hello linux”,然后按下回车,发现打印如下
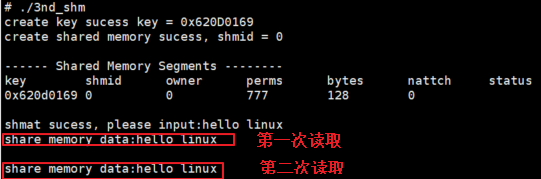
问题:代码中第51行读了一遍共享内存,然后第54行又读了一遍共享内存,发现两次都能读到共享内存的内容,说明共享内存被读了之后,内容仍然存在。而在管道中,读了一遍管道内容之后,如果紧接着读取第二遍(在没有新写入的前提下),我们是不能读到管道中的内容的,说明管道只要读取一次之后,内容就消失了,读者可以通过实验自行验证一下。
shmdt函数
函数原型:int shmdt(const void *shmaddr)
参数 ; shmat的返回值
返回值 : 成功0,出错-1程序示例(参考jz2440process_ipc1st_shm4th_shm.c)
01 /**********************************************************************
02 * 功能描述: 1.创建共享内存,将该共享内存地址通过shmat映射到用户地址空间
03 2.用户通过标准输入向这个共享内存中输入一行字符串
04 3.然后从该共享内存中读取内容
05 4.调用shmdt解除地址映射,此时应用程序继续访问会出错
06 * 输入参数: 无
07 * 输出参数: 无
08 * 返 回 值: 无
09 * 修改日期 版本号 修改人 修改内容
10 * -----------------------------------------------
11 * 2020/05/16 V1.0 zh(ryan) 创建
12 ***********************************************************************/
13 #include
14 #include
15 #include
16 #include
17 #include
18 #include
19 #include
20
21 int main(int argc, char *argv[])
22 {
23 int shmid;
24 int key;
25 char *p;
26
27 key = ftok("./a.c", 'b');
28 if (key < 0) {
29 printf("create key failn");
30 return -1;
31 }
32 printf("create key sucess key = 0x%Xn",key);
33
34 shmid = shmget(key, 128, IPC_CREAT | 0777);
35 if (shmid < 0) {
36 printf("create shared memory failn");
37 return -1;
38 }
39 printf("create shared memory sucess, shmid = %dn", shmid);
40 system("ipcs -m");
41
42 p = (char *)shmat(shmid, NULL, 0);
43 if (p == NULL) {
44 printf("shmat failn");
45 return -1;
46 }
47 printf("shmat sucessn");
48
49 //write share memory
50 fgets(p, 128, stdin);
51
52 //start read share memory
53 printf("share memory data:%sn", p);
54
55 //start read share memory again
56 printf("share memory data:%sn", p);
57
58 //在用户空间删除共享内存的地址
59 shmdt(p);
60
61 memcpy(p, "abcd", 4); //执行这个语句会出现segment fault,因为解除了共享内存地址映射
62 return 0;
63 }JZ2440实验
- 编译
arm-linux-gcc 4th_shm.c -o 4th_shm- 拷贝到NFS文件系统
cp 4th_shm /work/nfs_root/first_fs- 运行
我们需要在4th_shm.c所在的同级目录下创建一个文件a.c(在jz2440开发板上)
touch a.c运行,此时会提示用户输入信息,输入完之后,执行第61行语句会出现Segmentation fault,这是程序期待的现象。
./4th_shm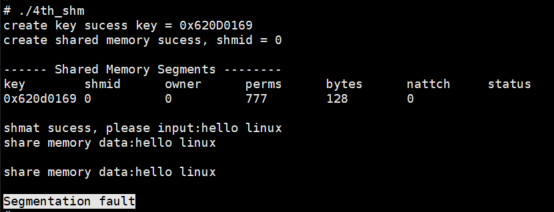
shmctl函数
函数原型:int shmctl(int shmid, int cmd, struct shmid_ds *buf)
参数: shmid : 共享内存标识符
cmd : IPC_START (获取对象属性) --- 实现了命令 ipcs -m
IPC_SET(设置对象属性)
IPC_RMID (删除对象属性) --- 实现了命令 ipcrm -m
buf : 指定IPC_START/IPC_SET时用以保存/设置属性
返回值 : 成功0,出错-1程序示例(参考jz2440process_ipc1st_shm5th_shm.c)
01 /**********************************************************************
02 * 功能描述: 1.创建共享内存,将该共享内存地址通过shmat映射到用户地址空间
03 2.用户通过标准输入向这个共享内存中输入一行字符串
04 3.然后从该共享内存中读取内容
05 4.调用shmdt解除地址映射,此时应用程序继续访问会出错
06 5.最后调用shmctl函数删除内核中的共享内存
07 * 输入参数: 无
08 * 输出参数: 无
09 * 返 回 值: 无
10 * 修改日期 版本号 修改人 修改内容
11 * -----------------------------------------------
12 * 2020/05/16 V1.0 zh(ryan) 创建
13 ***********************************************************************/
14
15 #include
16 #include
17 #include
18 #include
19 #include
20 #include
21 #include
22
23 int main(int argc, char *argv[])
24 {
25 int shmid;
26 int key;
27 char *p;
28
29 key = ftok("./a.c", 'b');
30 if (key < 0) {
31 printf("create key failn");
32 return -1;
33 }
34 printf("create key sucess key = 0x%Xn",key);
35
36 shmid = shmget(key, 128, IPC_CREAT | 0777);
37 if (shmid < 0) {
38 printf("create shared memory failn");
39 return -1;
40 }
41 printf("create shared memory sucess, shmid = %dn", shmid);
42 system("ipcs -m");
43
44 p = (char *)shmat(shmid, NULL, 0);
45 if (p == NULL) {
46 printf("shmat failn");
47 return -1;
48 }
49 printf("shmat sucessn");
50
51 //write share memory
52 fgets(p, 128, stdin);
53
54 //start read share memory
55 printf("share memory data:%sn", p);
56
57 //start read share memory again
58 printf("share memory data:%sn", p);
59
60 //在用户空间删除共享内存的地址
61 shmdt(p);
62
63 //memcpy(p, "abcd", 4); //执行这个语句会出现segment fault
64
65 shmctl(shmid, IPC_RMID, NULL);
66 system("ipcs -m");
67 return 0;
68 }JZ2440实验
- 编译
arm-linux-gcc 5th_shm.c -o 5th_shm- 拷贝到NFS文件系统
cp 5th_shm /work/nfs_root/first_fs- 运行
touch a.c 运行。此时会提示用户输入信息,第一次执行第42行语句时,读者可以看到共享内存,第二次执行第66行语句时,读者就看不到共享内存了,因为此时共享内存已经被删除了。
./4th_shm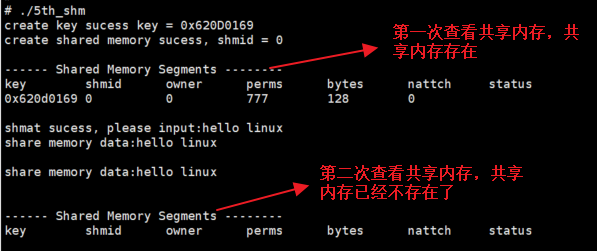
4.4.1.4 共享内存实现进程间通信
步骤:
1. 创建/打开共享内存
2. 映射共享内存,即把指定的共享内存映射到进程的地址空间用于访问
3. 读写共享内存
4. 撤销共享内存映射
5. 删除共享内存对象使用共享内存时的一些注意点或是限制条件
1. 共享内存的数量是有限制的,通过ipcs -l命令查看,当然如果我们具有管理员权限,可以通过 cat /proc/sys/kernel/shmmax来查看
2. 共享内存删除的时间点,shmctl添加删除标记,只有当所有进程都取消共享内存映射时(即所有进程调用shmdt之后),才会删除共享内存。示例源码(参考jz2440process_ipc1st_shm6th_shm.c)
01 /**********************************************************************
02 * 功能描述: 1.在父进程中创建使用key值为IPC_PRIVATE创建一个共享内存
03 2.然后在父进程中创建一个子进程
04 3.通过标准输入,父进程向共享内存中写入字符串
05 4.父进程调用发送信号函数通知子进程可以读取共享内存了
06 5.子进程收到父进程发送过来的信号,开始读取共享内存
07 6.子进程读完共享内存后,发送信号通知父进程读取完成
08 * 输入参数: 无
09 * 输出参数: 无
10 * 返 回 值: 无
11 * 修改日期 版本号 修改人 修改内容
12 * -----------------------------------------------
13 * 2020/05/16 V1.0 zh(ryan) 创建
14 ***********************************************************************/
15
16 #include
17 #include
18 #include
19 #include
20 #include
21 #include
22 #include
23
24 void myfun(int signum)
25 {
26 return;
27 }
28
29 int main(int argc, char *argv[])
30 {
31 int shmid;
32 int key;
33 char *p;
34 int pid;
35
36
37 shmid = shmget(IPC_PRIVATE, 128, IPC_CREAT | 0777);
38 if (shmid < 0) {
39 printf("create shared memory failn");
40 return -1;
41 }
42 printf("create shared memory sucess, shmid = %dn", shmid);
43
44 pid = fork();
45 if (pid > 0) { // 父进程
46 signal(SIGUSR2, myfun);
47 p = (char *)shmat(shmid, NULL, 0);
48 if (p == NULL) {
49 printf("shmat failn");
50 return -1;
51 }
52 printf("parent process shmat sucessn");
53 while (1) {
54 //从标准输入获取字符串,将其写入到共享内存
55 printf("parent process begin to write memory data:");
56 fgets(p, 128, stdin);
57 kill(pid, SIGUSR1); // 发信号通知子进程读共享内存
58 pause(); // 等待子进程读完共享内存的信号
59 }
60 }
61 if (pid == 0) { // 子进程
62 signal(SIGUSR1, myfun);
63 p = (char *)shmat(shmid, NULL, 0);
64 if (p == NULL) {
65 printf("shmat failn");
66 return -1;
67 }
68 printf("child process shmat sucessn");
69 while (1) {
70 pause(); // 等待父进程发信号,准备读取共享内存
71 //子进程开始读共享内存,并发信号给父进程告知读完成
72 printf("child process read share memory data:%sn", p);
73 kill(getppid(), SIGUSR2);
74 }
75 }
76
77 //在用户空间删除共享内存的地址
78 shmdt(p);
79
80 //memcpy(p, "abcd", 4); //执行这个语句会出现segment fault
81
82 shmctl(shmid, IPC_RMID, NULL);
83 system("ipcs -m");
84 return 0;
85 }JZ2440实验
- 编译
arm-linux-gcc 6th_shm.c -o 6th_shm- 拷贝到NFS文件系统
cp 6th_shm /work/nfs_root/first_fs- 运行
父进程从标准输入获取用户输入的字符串,然后子进程会打印出该字符串。
./6th_shm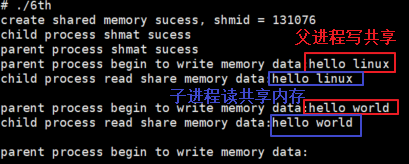
server进程源码(参考jz2440process_ipc1st_shm7th_shm_1.c)
01 /**********************************************************************
02 * 功能描述: 1.server进程使用ftok生成一个key值,利用这个key值创建一个共享内存
03 2.通过标准输入,向共享内存中写入字符串
04 3.server进程调用发送信号函数通知client进程
05 * 输入参数: 无
06 * 输出参数: 无
07 * 返 回 值: 无
08 * 修改日期 版本号 修改人 修改内容
09 * -----------------------------------------------
10 * 2020/05/16 V1.0 zh(ryan) 创建
11 ***********************************************************************/
12
13 #include
14 #include
15 #include
16 #include
17 #include
18 #include
19 #include
20
21 struct mybuf
22 {
23 int pid;
24 char buf[124];
25 };
26
27 void myfun(int signum)
28 {
29 return;
30 }
31
32 int main(int argc, char *argv[])
33 {
34 int shmid;
35 int key;
36 struct mybuf *p;
37 int pid;
38
39 key = ftok("./a.c", 'a');
40 if (key < 0) {
41 printf("create key failn");
42 return -1;
43 }
44 printf("create key sucessn");
45
46 shmid = shmget(key, 128, IPC_CREAT | 0777);
47 if (shmid < 0) {
48 printf("create shared memory failn");
49 return -1;
50 }
51 printf("create shared memory sucess, shmid = %dn", shmid);
52
53 signal(SIGUSR2, myfun);
54 p = (struct mybuf *)shmat(shmid, NULL, 0);
55 if (p == NULL) {
56 printf("shmat failn");
57 return -1;
58 }
59 printf("parent process shmat sucessn");
60
61 p->pid = getpid(); // 将server进程的pid号写入到共享内存
62 pause(); // 等待client读取到server pid号
63 pid=p->pid; // 获取client的进程号
64
65 while (1) {
66 //write share memory
67 printf("parent process begin to write memory datan");
68 fgets(p->buf, 124, stdin);
69 kill(pid, SIGUSR1); // 向client发送信号通知client读取共享内存数据
70 pause(); // 等待client读取完共享内存数据
71 }
72
73 //在用户空间删除共享内存的地址
74 shmdt(p);
75
76 shmctl(shmid, IPC_RMID, NULL);
77 system("ipcs -m");
78 return 0;
79 }client进程源码(参考jz2440process_ipc1st_shm7th_shm_2.c)
01 /**********************************************************************
02 * 功能描述: 1.client进程使用ftok生成一个key值,利用这个key值打开一个共享内存
03 2.client进程收到server进程发送过来的信号之后,开始读取共享内存
04 3.子进程读完共享内存后,发送信号通知父进程读取完成
05 * 输入参数: 无
06 * 输出参数: 无
07 * 返 回 值: 无
08 * 修改日期 版本号 修改人 修改内容
09 * -----------------------------------------------
10 * 2020/05/16 V1.0 zh(ryan) 创建
11 ***********************************************************************/
12
13 #include
14 #include
15 #include
16 #include
17 #include
18 #include
19 #include
20
21 struct mybuf
22 {
23 int pid;
24 char buf[124];
25 };
26
27 void myfun(int signum)
28 {
29 return;
30 }
31
32 int main(int argc, char *argv[])
33 {
34 int shmid;
35 int key;
36 struct mybuf *p;
37 int pid;
38
39 key = ftok("./a.c", 'a');
40 if (key < 0) {
41 printf("create key failn");
42 return -1;
43 }
44 printf("create key sucessn");
45
46 shmid = shmget(key, 128, IPC_CREAT | 0777);
47 if (shmid < 0) {
48 printf("create shared memory failn");
49 return -1;
50 }
51 printf("create shared memory sucess, shmid = %dn", shmid);
52
53 signal(SIGUSR1, myfun);
54 p = (struct mybuf *)shmat(shmid, NULL, 0);
55 if (p == NULL) {
56 printf("shmat failn");
57 return -1;
58 }
59 printf("client process shmat sucessn");
60
61 // get server pid
62 //read share memory
63 pid = p->pid;
64 // write client pid to share memory
65 p->pid = getpid();
66 kill(pid, SIGUSR2); // tell server process to read data
67
68 //client start to read share memory
69
70 while (1) {
71 pause(); // wait server process write share memory
72 printf("client process read data:%sn", p->buf); // read data
73 kill(pid, SIGUSR2); // server can write share memory
74 }
75
76 //在用户空间删除共享内存的地址
77 shmdt(p);
78
79 shmctl(shmid, IPC_RMID, NULL);
80 system("ipcs -m");
81 return 0;
82 } 该源码留给读者自行实验,需要注意的是,因为这个时候需要运行两个console,分别运行server进程和client进程,可以采用一个串口console,一个telnet console。我们也可以在ubuntu下开启两个terminal验证。
4.4.2 消息队列
4.4.2.1 什么是消息队列
消息队列是消息的链表,它是一个链式队列,和管道类似,每个消息多有最大长度限制,可用cat/proc/sys/kernel/msgmax查看。
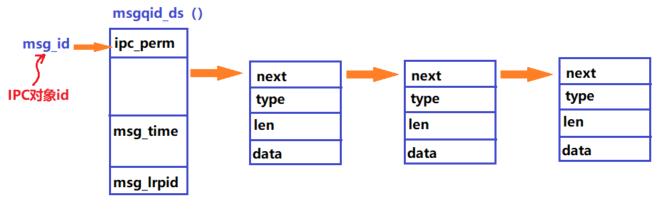
内核为每个消息队列对象维护了一个数据结构msgqid_ds,用于标识消息队列,以便让进程知道当前操作的是哪一个消息队列,每一个msqid_ds表示一个消息队列,并通过msqid_ds.msg_first、msg_last维护一个先进先出的msg链表队列,当发送一个消息到该消息队列时,把发送的消息构造成一个msg的结构对象,并添加到msqid_ds.msg_first、msg_last维护的链表队列。在内核中的表示如下:
4.4.2.2 特点
- 生命周期跟随内核,消息队列一直存在,需要用户显示调用接口删除或者使用命令删除。
- 消息队列可以实现双向通信
- 克服了管道只能承载无格式字节流的缺点
4.4.2.3 消息队列函数
msgget函数
创建或者打开消息队列的函数
头文件:#include
#include
#include
原型: int msgget(key_t key, int flag)
参数: key 和消息队列关联的key值
flag 消息队列的访问权限
返回值: 成功,消息队列ID,出错 -1msgctl函数
消息队列控制函数
原型: int msgctl(int msgqid, int cmd, struct msqid_ds *buf)
参数: msgqid 消息队列ID
cmd IPC_STAT 读取消息队列的属性,并将其保存在buf指向的缓冲区中
IPC_SET 设置消息队列的属性,这个值取自buf参数
IPC_RMID 从系统中删除消息队列
buf 消息缓冲区
返回值: 成功 0,出错 -1msgsnd函数
把一条消息添加到消息队列中
头文件#include
#include
#include
原型: int msgsnd(int msgqid, const void *msgp, size_t size, int flag)
参数: msgqid 消息队列ID
msgp 指向消息的指针,常用消息结构msgbuf如下
struct msgbuf {
long mtype; //消息类型
char mtext[N]; //消息正文
};
size 消息正文的字节数
flag IPC_NOWAIT 消息没有发送完成也会立即返回
0: 直到发送完成函数才会返回
返回值: 成功 0,出错 -1msgrcv函数
从一个消息队列接受消息
原型: int msgrcv(int msgqid, void *msgp, size_t size, long msgtype, int flag)
参数: msgqid 消息队列ID
msgp 接收消息的缓冲区
size 要接收消息的字节数
msgtype 0 接收消息队列中第一个消息
大于0 接收消息队列中第一个类型为msgtype的消息
小于0 接收消息队列中类型值不大于msgtype的绝对值且类型值又最小的消息
flag IPC_NOWAIT 没有消息,会立即返回
0: 若无消息则会一直阻塞
返回值: 成功 接收消息的长度,出错 -14.4.2.4 消息队列实现进程间通信
server源码(参考jz2440process_ipc2nd_shmwrite_msg.c)
01 /**********************************************************************
02 * 功能描述: 1.server进程向消息队列中写数据
03 * 输入参数: 无
04 * 输出参数: 无
05 * 返 回 值: 无
06 * 修改日期 版本号 修改人 修改内容
07 * -----------------------------------------------
08 * 2020/05/16 V1.0 zh(ryan) 创建
09 ***********************************************************************/
10
11 #include
12 #include
13 #include
14 #include
15 #include
16 #include
17 #include
18
19 struct msgbuf {
20 long type; //消息类型
21 char voltage[124]; //消息正文
22 char ID[4];
23 };
24
25 int main(int argc, char *argv[])
26 {
27 int msgid, readret, key;
28 struct msgbuf sendbuf;
29
30 key = ftok("./a.c", 'a');
31 if (key < 0){
32 printf("create key failn");
33 return -1;
34 }
35 msgid = msgget(key, IPC_CREAT|0777);
36 if (msgid < 0) {
37 printf("create msg queue failn");
38 return -1;
39 }
40 printf("create msg queue sucess, msgid = %dn", msgid);
41 system("ipcs -q");
42
43 // write message queue
44 sendbuf.type = 100;
45 while(1) {
46 memset(sendbuf.voltage, 0, 124); //clear send buffer
47 printf("please input message:");
48 fgets(sendbuf.voltage, 124, stdin);
49 //start write msg to msg queue
50 msgsnd(msgid, (void *)&sendbuf, strlen(sendbuf.voltage), 0);
51 }
52
53 return 0;
54 }client源码(参考jz2440process_ipc2nd_shmread_msg.c)
01 /**********************************************************************
02 * 功能描述: 1.client进程从消息队列中读数据
03 * 输入参数: 无
04 * 输出参数: 无
05 * 返 回 值: 无
06 * 修改日期 版本号 修改人 修改内容
07 * -----------------------------------------------
08 * 2020/05/16 V1.0 zh(ryan) 创建
09 ***********************************************************************/
10
11 #include
12 #include
13 #include
14 #include
15 #include
16 #include
17 #include
18
19 struct msgbuf {
20 long type; //消息类型
21 char voltage[124]; //消息正文
22 char ID[4];
23 };
24
25 int main(int argc, char *argv[])
26 {
27 int msgid, key;
28 struct msgbuf readbuf;
29
30 key = ftok("./a.c", 'a');
31 if (key < 0){
32 printf("create key failn");
33 return -1;
34 }
35 msgid = msgget(key, IPC_CREAT|0777);
36 if (msgid < 0) {
37 printf("create msg queue failn");
38 return -1;
39 }
40 printf("create msg queue sucess, msgid = %dn", msgid);
41 system("ipcs -q");
42
43 // read message queue
44 while(1) {
45 memset(readbuf.voltage, 0, 124); //clear recv buffer
46 //start read msg to msg queue
47 msgrcv(msgid, (void *)&readbuf, 124, 100, 0);
48 printf("recv data from message queue:%s", readbuf.voltage);
49 }
50
51 return 0;
52 }JZ2440实验
- 编译
arm-linux-gcc write_msg.c -o write_msg
arm-linux-gcc read_msg.c -o read_msg- 拷贝到NFS文件系统
cp write_msg /work/nfs_root/first_fs
cp read_msg /work/nfs_root/first_fs- 运行
先在后台执行read_msg,然后在前台运行write_msg,此时在console下输入字符串,可以看到client进程能读到消息队列中的字符串 。
./read_msg &
./ write_msg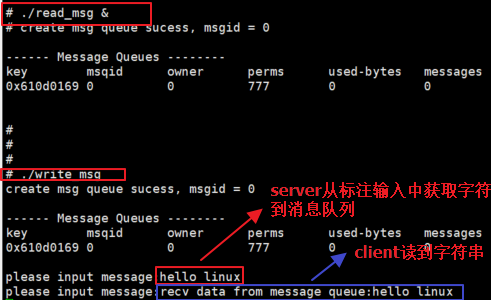
4.4.3 信号量灯
4.4.3.1 什么是P、V操作
当不同进程需要访问同一个资源时,由于不同进程的执行次序是未知的,有可能某个进程正在写该资源,而另一个进程正在读该资源,这样会造成进程执行的不确定性。这样的同一个资源,我们称为共享资源,共享资源一次只允许一个进程访问。因此进程在访问共享资源时,需要加上同步、互斥操作。
一般地,P操作表示申请该共享资源,V操作表示释放该共享资源。
4.4.3.2 什么是信号量灯
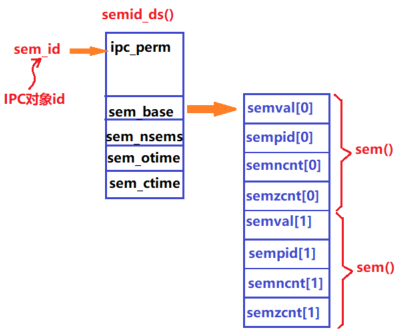
它是信号量的集合,包含多个信号量,可对多个信号灯同时进行P/V操作,主要用来实现进程、线程间同步/互斥。内核为每个信号量灯维护了一个数据结构semid_ds,用于标识信号量灯,以便进程知道当前操作的是哪个信号量灯,在内核中的表示如下所示。
它和POSIX规范中的信号量有什么区别呢?POSIX规范中的信号量只作用于一个信号量,而IPC对象中的信号量灯会作用于一组信号量。
|
功能 |
信号量(POSIX) |
信号量灯(IPC对象) |
|---|---|---|
|
定义信号变量 |
sem_t sem1 |
semget |
|
初始化信号量 |
sem_init |
semctl |
|
P操作 |
sem_wait |
semop |
|
V操作 |
sem_post |
semop |
为什么需要IPC对象中的信号量灯呢?有POSIX规范中的信号量不够吗?
考虑如下场景:
- 线程A和线程B都需要访问共享资源1和共享资源2,在线程A中会需要先申请共享资源1,然后再申请共享资源2。
- 但是在线程B中,会先申请贡献资源2,然后再申请共享资源1。
- 当线程A中开始申请共享资源1时,紧接着会申请共享资源2;而此时线程B中开始申请共享资源2时,紧接着会申请共享资源1。
- 线程B正在占用着共享资源2,线程A正在占着共享资源1,导致线程B申请不到共享资源1,它就不会释放共享资源2;线程A申请不到共享资源2,它就不会释放共享资源1;这样就造成了死锁。
4.4.3.3 信号量灯函数
semget函数
创建或者打开函数
头文件#includde
#includde
#includde
原型: int semget(key_t key, int nsems, int semflag)
参数: key 和信号灯集关联的key值
nsems 信号灯集包含的信号灯数目
semflag 信号灯集的访问权限
返回值: 成功,信号灯ID,出错 -1semctl函数
信号量灯控制函数
头文件#includde
#includde
#includde
原型: int semctl(int semid, int semnum, int cmd, ...union semun arg)
注意最后一个参数不是地址,可以有,可以没有
参数: semid 信号灯集id
semnum 要修改的信号灯集编号,删除操作时,这个值可以设置为任意值
cmd GETVAL 获取信号灯的值
SETVAL 设置信号灯的值
IPC_RMID 删除信号灯
union semun arg: union semun {
int val; /* Value for SETVAL */
struct semid_ds *buf; /* Buffer for IPC_STAT, IPC_SET */
unsigned short *array; /* Array for GETALL, SETALL */
struct seminfo *__buf; /* Buffer for IPC_INFO (Linux-specific) */
};
返回值: 成功,消息队列ID,出错 -1semop函数
p/v操作函数
头文件#includde
#includde
#includde
原型: int semop(int semid, struct sembuf *opsptr, size_t nops)
参数: semid 信号灯集id
opsptr struct sembuf{
short sem_num; //要操作信号灯的编号
short sem_op; //0: 等待,直到信号灯的值变为0,1:资源释放,V操作,-1:分配资源,P操作
short sem_flg; //0: IPC_NOWAIT, SEM_UNDO
}
nops 要操作信号灯个数
返回值: 成功,消息队列ID,出错 -14.4.3.4 信号量灯实现进程间同步/互斥
程序源码(参考jz2440process_ipc3rd_shmshare_sysv.c)
01 /**********************************************************************
02 * 功能描述: 1.父进程从键盘输入字符串到共享内存.
03 2.子进程删除字符串中的空格并打印.
04 3.父进程输入quit后删除共享内存和信号灯集,程序结束.
05 * 输入参数: 无
06 * 输出参数: 无
07 * 返 回 值: 无
08 * 修改日期 版本号 修改人 修改内容
09 * -----------------------------------------------
10 * 2020/05/16 V1.0 zh(ryan) 创建
11 ***********************************************************************/
12
13 #include
14 #include
15 #include
16 #include
17 #include
18 #include
19 #include
20 #include
21 #include
22
23 #define N 64
24 #define READ 0
25 #define WRITE 1
26
27 union semun {
28 int val;
29 struct semid_ds *buf;
30 unsigned short *array;
31 struct seminfo *__buf;
32 };
33
34 void init_sem(int semid, int s[], int n)
35 {
36 int i;
37 union semun myun;
38
39 for (i = 0; i < n; i++){
40 myun.val = s[i];
41 semctl(semid, i, SETVAL, myun);
42 }
43 }
44
45 void pv(int semid, int num, int op)
46 {
47 struct sembuf buf;
48
49 buf.sem_num = num;
50 buf.sem_op = op;
51 buf.sem_flg = 0;
52 semop(semid, &buf, 1);
53 }
54
55 int main(int argc, char *argv[])
56 {
57 int shmid, semid, s[] = {0, 1};
58 pid_t pid;
59 key_t key;
60 char *shmaddr;
61
62 key = ftok(".", 's');
63 if (key == -1){
64 perror("ftok");
65 exit(-1);
66 }
67
68 shmid = shmget(key, N, IPC_CREAT|0666);
69 if (shmid < 0) {
70 perror("shmid");
71 exit(-1);
72 }
73
74 semid = semget(key, 2, IPC_CREAT|0666);
75 if (semid < 0) {
76 perror("semget");
77 goto __ERROR1;
78 }
79 init_sem(semid, s, 2);
80
81 shmaddr = shmat(shmid, NULL, 0);
82 if (shmaddr == NULL) {
83 perror("shmaddr");
84 goto __ERROR2;
85 }
86
87 pid = fork();
88 if(pid < 0) {
89 perror("fork");
90 goto __ERROR2;
91 } else if (pid == 0) {
92 char *p, *q;
93 while(1) {
94 pv(semid, READ, -1);
95 p = q = shmaddr;
96 while (*q) {
97 if (*q != ' ') {
98 *p++ = *q;
99 }
100 q++;
101 }
102 *p = '';
103 printf("%s", shmaddr);
104 pv(semid, WRITE, 1);
105 }
106 } else {
107 while (1) {
108 pv(semid, WRITE, -1);
109 printf("input > ");
110 fgets(shmaddr, N, stdin);
111 if (strcmp(shmaddr, "quitn") == 0) break;
112 pv(semid, READ, 1);
113 }
114 kill(pid, SIGUSR1);
115 }
116
117 __ERROR2:
118 semctl(semid, 0, IPC_RMID);
119 __ERROR1:
120 shmctl(shmid, IPC_RMID, NULL);
121 return 0;
122 }JZ2440实验
- 编译
arm-linux-gcc share_sysv.c -o share_sysv- 拷贝到NFS文件系统
cp share_sysv /work/nfs_root/first_fs- 运行
在父进程的console下输入字符串,此时子进程会读取到这个字符串。
./share_sysv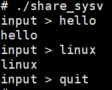
4.5 进程通信之信号通信
4.5.1 信号机制
- 一般地,中断主要是指硬件中断,比如GPIO中断、定时器中断,这些硬件中断时外设模块工作时,发送给CPU的,也是一种异步方式。
- 信号是软件层次上对中断机制的一种模拟,是一种异步通信方式。
- Linux内核通过信号通知用户进程,不同的信号类型代表不同的事件。
- Linux对早期的unix信号机制进行了扩展。
4.5.2 常见信号类型
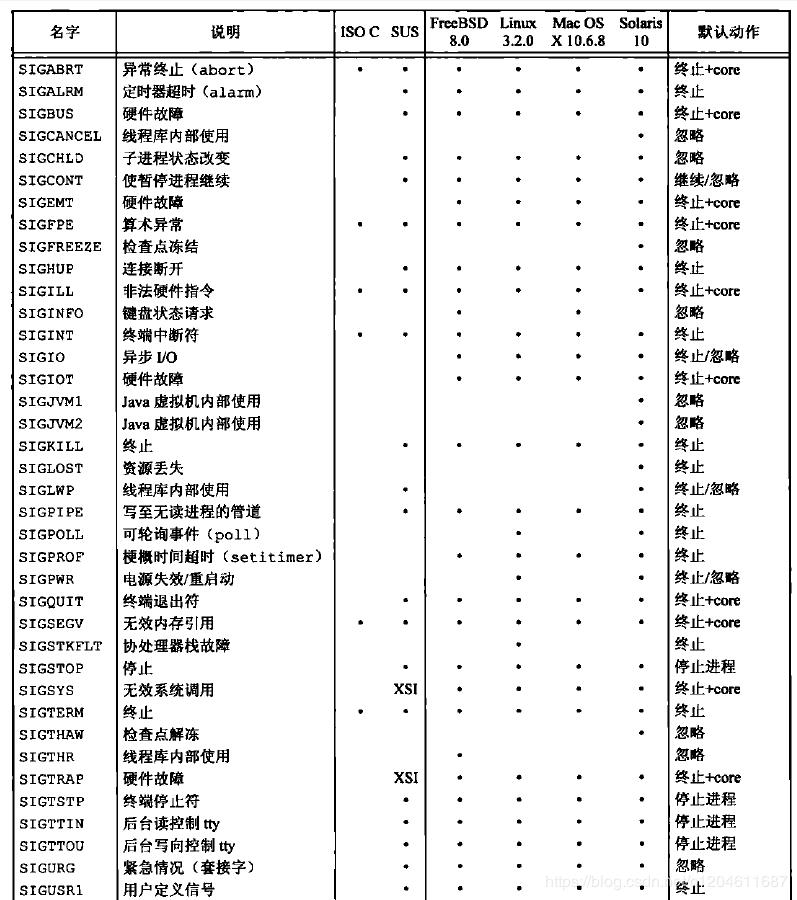
4.5.3 信号发送函数
kill函数
头文件 #include
#include
函数原型int kill(pid_t pid, int sig);
参数 pid : 指定接收进程的进程号
0代表同组进程;-1代表所有除了INIT进程和当前进程之外的进程
sig : 信号类型
返回值 成功返回0,失败返回EOFraise函数
头文件 #include
#include
函数原型int raise(int sig);
参数 sig : 信号类型
返回值 成功返回0,失败返回EOFalarm函数
头文件 #include
#include
函数原型 int alarm(unsigned int seconds);
参数 seconds 定时器的时间
返回值 成功返回上个定时器的剩余时间,失败返回EOFpause函数
进程调用这个函数后会一直阻塞,直到而被信号中断,功能和sleep类似。
头文件 #include
#include
函数原型 int pause(void);
返回值 成功返回0,失败返回EOFsignal函数
设置信号响应方式,请注意这个函数和kill、killall的区别,我们中文使用者会理解为发信号,实际上它并不是发信号。
头文件 #include
#include
函数原型 void (*signal(int signo, void(*handler)(int)))(int)
参数 signo 要设置的信号类型
handler 指定的信号处理函数;
返回值 成功返回0,失败返回EOF4.5.4 进程捕捉信号
程序源码(参考jz2440process_singlesend_single.c)
01 /**********************************************************************
02 * 功能描述: 1.捕捉终端发送过来的信号
03 * 输入参数: 无
04 * 输出参数: 无
05 * 返 回 值: 无
06 * 修改日期 版本号 修改人 修改内容
07 * -----------------------------------------------
08 * 2020/05/16 V1.0 zh(ryan) 创建
09 ***********************************************************************/
10
11 #include
12 #include
13 #include
14 #include
15 #include
16
17 void handler(int signo)
18 {
19 switch (signo) {
20 case SIGINT:
21 printf("I have got SIGINTn");
22 break;
23
24 case SIGQUIT:
25 printf("I have got SIGQUITn");
26 break;
27
28 default:
29 printf("don't respond to this signal[%d]n", signo);
30 exit(0);
31 }
32 }
33
34 int main(int argc, char *argv[])
35 {
36 signal(SIGINT, handler);
37 signal(SIGQUIT, handler);
38 while (1)
39 pause();
40 return 0;
41 }JZ2440实验
- 编译
arm-linux-gcc send_single.c -o send_single- 拷贝到NFS文件系统
cp send_single /work/nfs_root/first_fs- 运行
./send_single 实际上在利用共享内存实现进程间通信时,我们已经使用到了信号通信,父进程写完共享内存后发送信号通知子进程,子进程收到信号后开始读共享内存,这里就不在给出两个进程之间使用信号通信的例子了,请读者参考共享内存中实现两个进程通信的代码。
4.6 进程通信之socket通信
4.6.1 什么是socket
先思考一个问题:网络环境中的进程如何实现通信?比如当我们使用QQ和好友聊天的时候,QQ进程是如何与服务器以及你好友所在的QQ进程之间通信的?这些靠的就是socket来实现的。
Socket起源于UNIX,Unix/Linux基本哲学之一就是“一切皆文件”,都可以用“打开open –> 读写write/read –> 关闭close”模式来操作。在《有名管道》那一节中,我们知道socket也是一种文件类型,只不过socket是一种伪文件,存在于内核缓冲区中,大小不变,一直是0。
socket文件一定是成对出现的,server端有一个套接字文件,client端也有一个套接字文件,每个进程需要和对应的套接字文件绑定,每个进程通过读写它的套接字文件,交由内核实现,如下所示。
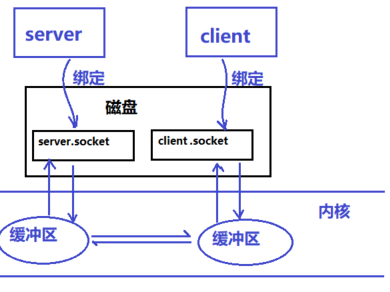
一般地,socket用来实现网络环境中,不同主机上的进程通信,但是也可以用来在同一个主机上的不同进程之间通信,本小节主要探讨socket用在同一个主机上的不同进程间通信。
4.6.2 相关函数
socket函数
创建socket文件描述符函数
头文件#include
#include
原型: int socket(int domain, int type, int protocol)
返回值: 成功,消息队列ID,出错 -1bind函数
将socket文件描述符和某个socket文件绑定
头文件#include
#include
原型: int bind(int sockfd, const struct sockaddr *addr, socklen_t addrlen);
参数: sockfd:利用系统调用socket()建立的套接字描述符
addr:代表需要绑定的本地地址信息
addrlen: 本地地址信息长度
返回值: 成功,消息队列ID,出错 -1listen函数
设置监听某个socket文件描述符,设置能够同时和服务端连接的客户端数量,一般只有server会调用
头文件#include
#include
原型: int listen(int sockfd, int backlog);
参数: sockfd:利用系统调用socket()建立的套接字描述符
backlog:server可以接受连接的最大client数量
返回值: 成功,消息队列ID,出错 -1accept函数
等待client建立连接的函数,一般只有server会调用
头文件#include
#include
原型: int accept(int sockfd,struct sockaddr *addr,socklen_t *addrlen);
参数: sockfd:利用系统调用socket()建立的套接字描述符
addr:指向已经建立连接的对端client地址信息的指针
addrlen: 对端client地址信息长度
返回值: 成功,消息队列ID,出错 -1connet函数
client主动连接server函数,一般只有client才会调用
头文件#include
#include
原型: int connect(int sockfd, const struct sockaddr *addr, socklen_t addrlen);
参数: sockfd:利用系统调用socket()建立的套接字描述符
addr:指向已经建立连接的对端server地址信息的指针
addrlen: 对端server地址信息长度
返回值: 成功,消息队列ID,出错 -1send函数
发送数据函数
头文件#include
#include
原型: ssize_t send(int sockfd, const void *buf, size_t len, int flags);
参数: sockfd:指向要发送数据的socket文件描述符,已经建立连接的文件描述符
buf: 存放要发送数据的缓冲区
len: 实际要发送数据的字节数
flags: 一般为0或者如下的宏
MSG_DONTROUTE 绕过路由表查找
MSG_DONTWAIT 仅本操作非阻塞
MSG_OOB 发送或接收带外数据
MSG_PEEK 窥看外来消息
MSG_WAITALL 等待所有数据
返回值: 成功,消息队列ID,出错 -1recv函数
接收数据函数
头文件#include
#include
原型: ssize_t recv(int sockfd, void *buf, size_t len, int flags);
参数: sockfd:已经建立连接的文件描述符
buf: 存放要接收数据的缓冲区
len: 实际要接收数据的字节数
flags:一般为0或者如下的宏
MSG_DONTROUTE 绕过路由表查找
MSG_DONTWAIT 仅本操作非阻塞
MSG_OOB 发送或接收带外数据
MSG_PEEK 窥看外来消息
MSG_WAITALL 等待所有数据
返回值: 成功,消息队列ID,出错 -14.6.3 socket实现进程间通信
程序实现一般步骤
Server端
1.创建socket
2.绑定socket
3.设置监听
4.等待客户端连接
5.发送/接收数据Client端
1.创建socket
2.绑定socket
3.连接
4.发送/接收数据server源码(参考jz2440process_socketserver.c)
01 /**********************************************************************
02 * 功能描述: 1.server打印client发送过来的字符串,并将该字符串回发给client
03 * 输入参数: 无
04 * 输出参数: 无
05 * 返 回 值: 无
06 * 修改日期 版本号 修改人 修改内容
07 * -----------------------------------------------
08 * 2020/05/16 V1.0 zh(ryan) 创建
09 ***********************************************************************/
10
11 #include
12 #include
13 #include
14 #include
15 #include
16 #include
17 #include
18 #include
19
20 int main(int argc, char *argv[])
21 {
22 int lfd ,ret, cfd;
23 struct sockaddr_un serv, client;
24 socklen_t len = sizeof(client);
25 char buf[1024] = {0};
26 int recvlen;
27
28 //创建socket
29 lfd = socket(AF_LOCAL, SOCK_STREAM, 0);
30 if (lfd == -1) {
31 perror("socket error");
32 return -1;
33 }
34
35 //如果套接字文件存在,删除套接字文件
36 unlink("server.sock");
37
38 //初始化server信息
39 serv.sun_family = AF_LOCAL;
40 strcpy(serv.sun_path, "server.sock");
41
42 //绑定
43 ret = bind(lfd, (struct sockaddr *)&serv, sizeof(serv));
44 if (ret == -1) {
45 perror("bind error");
46 return -1;
47 }
48
49 //设置监听,设置能够同时和服务端连接的客户端数量
50 ret = listen(lfd, 36);
51 if (ret == -1) {
52 perror("listen error");
53 return -1;
54 }
55
56 //等待客户端连接
57 cfd = accept(lfd, (struct sockaddr *)&client, &len);
58 if (cfd == -1) {
59 perror("accept error");
60 return -1;
61 }
62 printf("=====client bind file:%sn", client.sun_path);
63
64 while (1) {
65 recvlen = recv(cfd, buf, sizeof(buf), 0);
66 if (recvlen == -1) {
67 perror("recv error");
68 return -1;
69 } else if (recvlen == 0) {
70 printf("client disconnet...n");
71 close(cfd);
72 break;
73 } else {
74 printf("server recv buf: %sn", buf);
75 send(cfd, buf, recvlen, 0);
76 }
77 }
78
79 close(cfd);
80 close(lfd);
81 return 0;
82 }client源码(参考jz2440process_socketclient.c)
01 /**********************************************************************
02 * 功能描述: 1.client从标准输入获取到一个字符串,然后将这个字符串发送给server
03 * 输入参数: 无
04 * 输出参数: 无
05 * 返 回 值: 无
06 * 修改日期 版本号 修改人 修改内容
07 * -----------------------------------------------
08 * 2020/05/16 V1.0 zh(ryan) 创建
09 ***********************************************************************/
10
11 #include
12 #include
13 #include
14 #include
15 #include
16 #include
17 #include
18 #include
19
20 int main(int argc, char *argv[])
21 {
22 int lfd ,ret;
23 struct sockaddr_un serv, client;
24 socklen_t len = sizeof(client);
25 char buf[1024] = {0};
26 int recvlen;
27
28 //创建socket
29 lfd = socket(AF_LOCAL, SOCK_STREAM, 0);
30 if (lfd == -1) {
31 perror("socket error");
32 return -1;
33 }
34
35 //如果套接字文件存在,删除套接字文件
36 unlink("client.sock");
37
38 //给客户端绑定一个套接字文件
39 client.sun_family = AF_LOCAL;
40 strcpy(client.sun_path, "client.sock");
41 ret = bind(lfd, (struct sockaddr *)&client, sizeof(client));
42 if (ret == -1) {
43 perror("bind error");
44 return -1;
45 }
46
47 //初始化server信息
48 serv.sun_family = AF_LOCAL;
49 strcpy(serv.sun_path, "server.sock");
50 //连接
51 connect(lfd, (struct sockaddr *)&serv, sizeof(serv));
52
53 while (1) {
54 fgets(buf, sizeof(buf), stdin);
55 send(lfd, buf, strlen(buf)+1, 0);
56
57 recv(lfd, buf, sizeof(buf), 0);
58 printf("client recv buf: %sn", buf);
59 }
60
61 close(lfd);
62 return 0;
63 }JZ2440实验
- 编译
arm-linux-gcc server.c -o server
arm-linux-gcc client.c -o client- 拷贝到NFS文件系统
cp server /work/nfs_root/first_fs
cp client /work/nfs_root/first_fs- 运行
为方便看程序运行结果,server在后台执行;client在前台运行,client能够接收来自终端的输入。
./server &
./client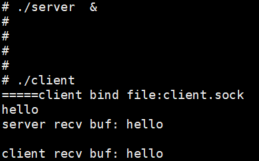
4.6.4 一个server和多个client之间的通信
在实际项目开发中, 更常见的一种场景是:一个server要和多个client之间通信,这部分实现方式交给读者自行实现,实现的方式有很多,比如如下两种方式,当然还要其他方法。
- 多进程实现,一个主进程用来实现检测client的连接,每检测一次client连接,则为这个client创建一个专门的进程,用于实现两者间通信。
- 也可以使用多线程实现,一个主线程用来检测client的连接,每检测一次client连接,则为这个client创建一个专门的线程,用于实现两者间通信。
文章来源于互联网:Linux应用开发【第四章】Linux进程间通信应用开发
1、本站所有资源均从互联网上收集整理而来,仅供学习交流之用,因此不包含技术服务请大家谅解!
2、本站不提供任何实质性的付费和支付资源,所有需要积分下载的资源均为网站运营赞助费用或者线下劳务费用!
3、本站所有资源仅用于学习及研究使用,您必须在下载后的24小时内删除所下载资源,切勿用于商业用途,否则由此引发的法律纠纷及连带责任本站和发布者概不承担!
4、本站站内提供的所有可下载资源,本站保证未做任何负面改动(不包含修复bug和完善功能等正面优化或二次开发),但本站不保证资源的准确性、安全性和完整性,用户下载后自行斟酌,我们以交流学习为目的,并不是所有的源码都100%无错或无bug!如有链接无法下载、失效或广告,请联系客服处理!
5、本站资源除标明原创外均来自网络整理,版权归原作者或本站特约原创作者所有,如侵犯到您的合法权益,请立即告知本站,本站将及时予与删除并致以最深的歉意!
6、如果您也有好的资源或教程,您可以投稿发布,成功分享后有站币奖励和额外收入!
7、如果您喜欢该资源,请支持官方正版资源,以得到更好的正版服务!
8、请您认真阅读上述内容,注册本站用户或下载本站资源即您同意上述内容!
原文链接:https://www.dandroid.cn/21624,转载请注明出处。


评论0